Excavator Human Study
Game goal:
Use the excavator arm to touch the red target. (Tip: looking for "No.1/2/3" in the air indicating target location, they may hide behind obstacles)
Control:
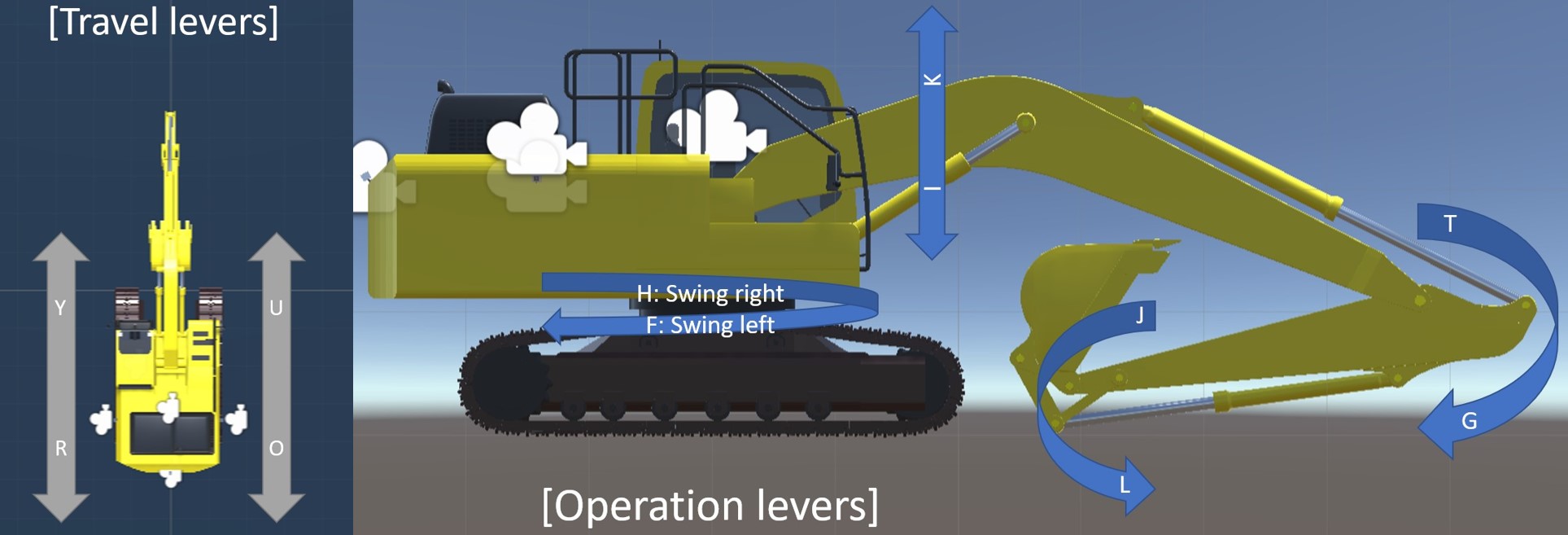
[Travel levers]
O: Right track reverse
U: Right track forward
Y: Left track forward
R: Left track reverse
RTUYIOP
FGH LJI
[Operation levers]
I: Boom roll in
K: Boom roll out
L: Bucket roll out
J: Bucket roll in
T: Arm roll out
G: Arm roll in
H: Swing right
F: Swing left
Original model from:https://github.com/araobp/unity-excavator
Consent to take part in “Robot shared autonomy human study”:
I confirm that I have read and understand the information sheet version explaining the above research project and I have had the opportunity to ask questions about the project.
I understand that my participation is voluntary and that I am free to withdraw 14 days after participating each time without giving any reason and without there being any negative consequences. In addition, should I not wish to answer any particular question or questions, I am free to decline.
I understand that members of the research team may have access to my anonymised responses. I understand that my name will not be linked with the research materials, and I will not be identified or identifiable in the report or reports that result from the research. I understand that my responses will be kept strictly confidential.
Participant information sheet for “Robot shared autonomy human study”
You are being invited to take part in a research project. Before you decide it is important for you to understand why the research is being done and what it will involve. Please take time to read the following information carefully and discuss it with others if you wish. Ask us if there is anything that is not clear or if you would like more information. Take time to decide whether or not you wish to take part.
What is the purpose of the project?
The study aims to evaluate the performance and usability of different robot shared control methods for one or more robot agents in simulation and real-world environment. Any question please contact: mnywa@leeds.ac.uk
Why have I been chosen?
You are chosen based on your volunteering.
Do I have to take part?
It is up to you to decide whether or not to take part. If you do decide to take part you will be given this information sheet to keep (and be asked to agree a consent form) and you can still withdraw within 14 days after participating each time. without it affecting any benefits that you are entitled to in any way. You do not have to give a reason.
What do I have to do?
We will ask you to teleoperate and shared control robots to complete different tasks and answer questions
What are the possible disadvantages and risks of taking part?
The 3D-based game may cause discomfort if you have 3D dizziness.
What are the possible benefits of taking part?
Whilst there are no immediate benefits for those people participating in the project, it is hoped that you will enjoy the teleoperation process itself.
Use, dissemination and storage of research data
We collect the game operation data, the game result, and the question answers to analysis their performance with different control methods. The data will be stored on the university OneDrive server and never on a personal computer.
What will happen to my personal information and results of the research project?
All the contact information that we collect about you during the course of the research will be kept strictly confidential and will stored separately from the research data. We will take steps wherever possible to anonymise the research data so that you will not be identified in any reports or publications.

Leave a comment
Log in with itch.io to leave a comment.